
Villanova University
9 Months
Robotics & Mechatronics
My Approach
In my research at Villanova University, I adopted a multifaceted approach focused on advancing robotics and mechatronics technologies, particularly in the area of autonomous localization and navigation in GNSS-denied environments. My work involved the integration of cutting-edge SLAM (Simultaneous Localization and Mapping) algorithms, Lidar-camera fusion, and robotics control systems to develop robust solutions capable of navigating and mapping challenging environments. This approach was grounded in a deep understanding of the technical complexities and a commitment to pushing the boundaries of autonomous robotics.
Vision and Innovation
The vision driving my work is to significantly enhance the capabilities of autonomous robots, particularly in environments where traditional navigation systems like GPS are unavailable. This was achieved by developing and refining SLAM algorithms and integrating them with innovative hardware and software solutions, such as ROS (Robot Operating System), Lidar, and camera-based systems. Innovation in my work is represented by the seamless fusion of Lidar and camera data to generate precise point clouds, enabling robots to autonomously navigate and operate with a high degree of accuracy.
Identifying Unique Challenges
My research identified and addressed unique challenges in autonomous robotics, particularly the need for reliable navigation in GNSS-denied environments. This involved understanding the balance between sensor fusion, computational efficiency, and the accuracy of the SLAM algorithms, especially in dynamic and unpredictable environments. I focused on developing systems that could effectively operate without relying on external positioning systems, ensuring autonomy in the most challenging conditions.
Resolving Complex Problems
Complex problems in autonomous navigation were addressed through innovative design and the application of advanced robotics principles. This included developing a robust robotics control system using ROS, fine-tuning navigation algorithms for optimal path planning, and implementing advanced computer vision techniques for real-time mapping. These solutions demonstrated the application of complex engineering principles to real-world challenges, achieving high performance while overcoming constraints such as sensor limitations and environmental variability.
User-Centric Design
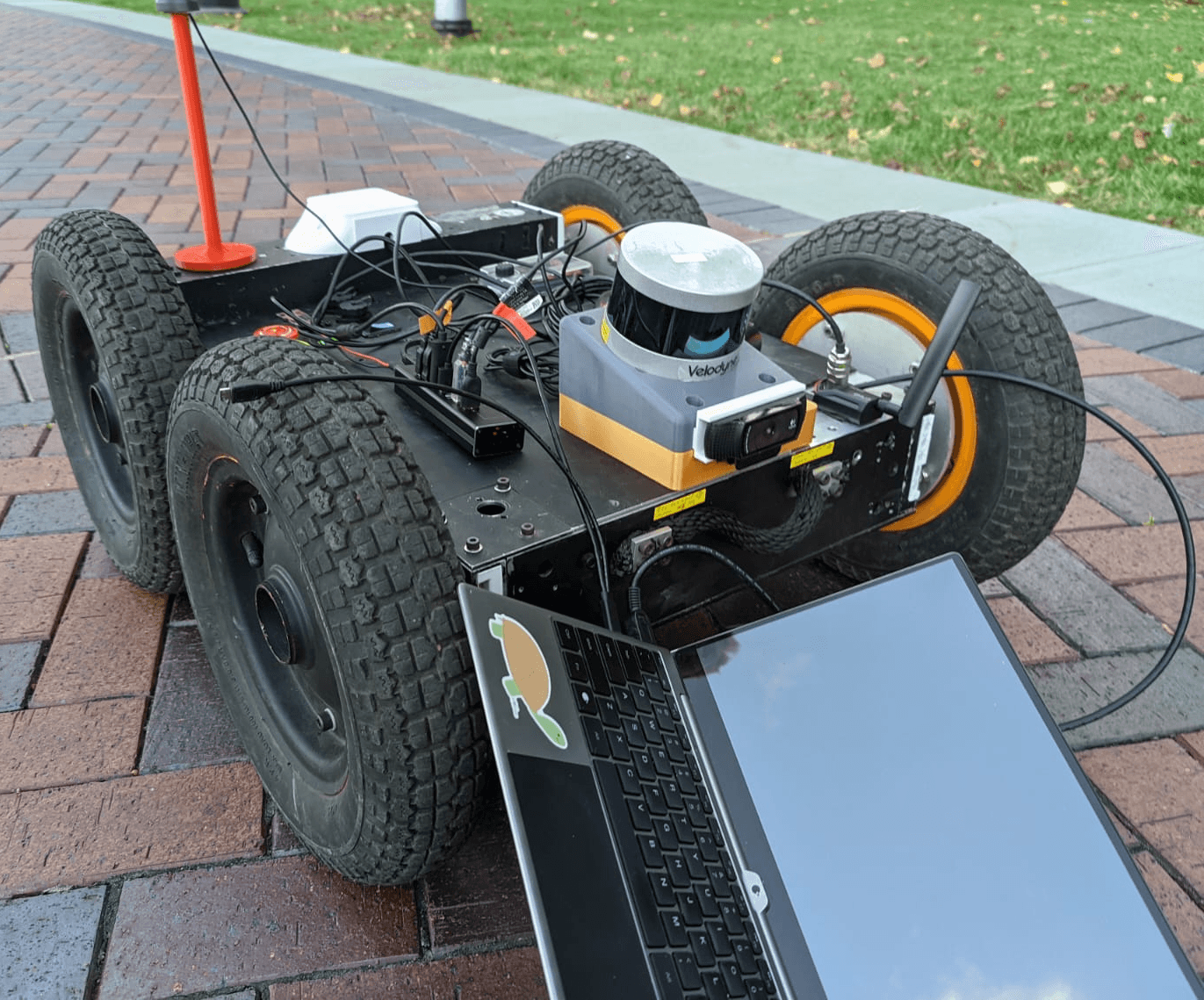
My research emphasized the importance of user-centric design, particularly in the development of the quad-wheel robot's control and navigation systems. The design ensured that, despite the complexity of the underlying algorithms, the system remained accessible and functional for end-users. The user-centric approach was further reflected in the ease of integration and operation of the system, ensuring that it could be effectively utilized in various real-world applications without extensive reconfiguration or technical expertise.
Video: Controlling EOD robot using wired controller. Initial phase of the research.
Meeting User Needs
Meeting user needs in autonomous robotics required a deep understanding of the operational environment and the constraints faced by users. My research addressed these needs by providing practical, robust, and easy-to-use solutions, such as a 2D histogram filter for environmental encoding and Kalman Filter-based tracking systems. These developments contributed to the creation of high-value, user-friendly technology that enhances the autonomy and functionality of robotic systems in complex environments.

